STM32�ǶԳ�PWMģʽʵ�ֶ�̬���� -
[����]MCU:STM32F334C8T6STM32�ж���PWMģʽ��ʵ�ָ��ֲ�ͬ��ǿ���ܣ�����ʹ�÷ǶԳ�PWMģʽ��ʵ�ֿɶ�̬�ı�������λ��ȫ��PWM������������ʲô�ǷǶԳ�PWMģʽ��Asymmetric mode allows two center-aligned PWM signal
MCU:STM32F334C8T6
�������õ�ַ: http://www.21ic.com/app/mcu/201807/780743.htm
STM32�ж���PWMģʽ��ʵ�ָ��ֲ�ͬ��ǿ���ܣ�����ʹ�÷ǶԳ�PWMģʽ��ʵ�ֿɶ�̬�ı�������λ��ȫ��PWM��������
����ʲô�ǷǶԳ�PWMģʽ��Asymmetric mode allows two center-aligned PWM signals to be generated with aprogrammable phase shift.
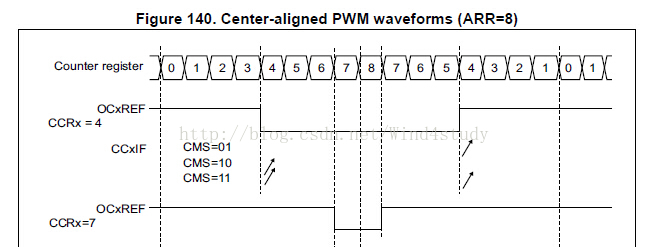
��ʲô��center-aligned PWM�����˱Ƚ�dz�Ե�����Ϊ�������������ļ���ģʽʱ��PWM������ͼ��ʾ������ST�ٷ��ο��ֲᣩ�����������֮ǰ����PWM�����IJ�֮ͬһ���Ǽ�����ģʽ��ѡ��һ����ѡ�����ļ���ģʽ���ɸ����жϵ���Ҫѡ�����ļ���ģʽ1,2,3. ѡ���ģʽ֮���Ӧ������һ�����⣬�Ǻ�֮ǰ��PWM����֮�����������ڣ��������Ķ���ģʽ��һ�������ڷֱ��������¼���һ�Σ��������ھͱ������ͨģʽ�µ�������Ҫ�����������Ƶ�ʲ��䣬��ô����ı��Զ���װ�ؼĴ���ARR��ֵ��ʹ��Ϊ��ͨģʽ�µ�һ�룬��ʵ��������Ҫ��Ƶ�ʵ������
�ǶԳ�PWMҲ������ģʽ��
Asymmetric PWM mode 1 - OC1REF has the same behavior as in PWM mode 1.OC1REFC outputs OC1REF when the counter is counting up, OC2REF when it is countingdown.
Asymmetric PWM mode 2 - OC1REF has the same behavior as in PWM mode 2.OC1REFC outputs OC1REF when the counter is counting up, OC2REF when it is countingdown.
�ǶԳ�PWMģʽ�¼Ĵ����������£�
�C OC1REFC (or OC2REFC) is controlled by TIMx_CCR1 and TIMx_CCR2
�C OC3REFC (or OC4REFC) is controlled by TIMx_CCR3 and TIMx_CCR4
����
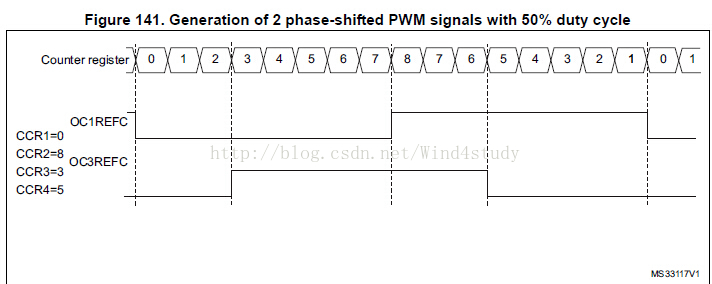
���Կ�����ֻҪ�ڳ����ж�̬��CCR3��CCR4��ֵ������ʵ�ֶ�̬��������λ���˹��ܶԾ��з������ڹ��ܵ�ϵͳ���зdz���Ҫ�����ã����Ը��ݷ�����ʵʱ������Ƕȣ��Ӷ�ʹ������Ӿ�ȷ���ȶ�����
��Ҫ���ִ��룺uint32_tPeriod=0;
Period=72*1000000/100000;//ʱ��Ƶ��72M�����100k
//���������GPIO��
TIM_TimeBaseInitStruct.TIM_CounterMode=TIM_CounterMode_CenterAligned1;//���ļ���ģʽ
TIM_TimeBaseInitStruct.TIM_Period=Period/2;//��������Ϊ��ͨģʽ�¼������ڵ�һ��
//����������TIM_TimeBaseInit();
TIM_OCInitStruct.TIM_OCMode=TIM_OCMode_Asymmetric_PWM1;//�ǶԳ�PWMģʽ1
TIM_OCInitStruct.TIM_Pulse=0;//��ֵΪ��ʼ��CCRx��ֵ
//��ʼʱû�����࣬CCR1=CCR3=0
TIM_OC1Init(PWM_TIM,&TIM_OCInitStruct);
TIM_OC1PreloadConfig(PWM_TIM,TIM_OCPreload_Enable);
TIM_OC3Init(PWM_TIM,&TIM_OCInitStruct);
TIM_OC3PreloadConfig(PWM_TIM,TIM_OCPreload_Enable);
//CCR2=CCR4=Period/2,����ռ�ձ�50%
TIM_OCInitStruct.TIM_Pulse=Period/2;
TIM_OC2Init(PWM_TIM,&TIM_OCInitStruct);
//����ѡ��Channel1��Channel3���������Ҫ2����������Բ���ҪPreloadConfig
//TIM_OC2PreloadConfig(PWM_TIM,TIM_OCPreload_Enable);
TIM_OC4Init(PWM_TIM,&TIM_OCInitStruct);
//TIM_OC4PreloadConfig(PWM_TIM,TIM_OCPreload_Enable);
/*
//���Թص�����Ҫʹ�õ�ͨ��
TIM_CCxCmd(TIM1,TIM_Channel_2,TIM_CCx_Disable);
TIM_CCxCmd(TIM1,TIM_Channel_4,TIM_CCx_Disable);
TIM_CCxNCmd(TIM1,TIM_Channel_2,TIM_CCxN_Disable);
*/
//BDTRInit........��֮ǰ�IJ���
//TIM_BDTRConfig(TIM1,&TIM_BDTRInitStruct);
//EnableTimer
TIM_Cmd(TIM1,ENABLE);
//EnablePWMoutput
TIM_CtrlPWMOutputs(TIM1,ENABLE);
//ʵ�����ຯ��
//ֻҪ�������ж�̬���ô˺�������ʵ�ֶ�̬������Ƕ�
//����:��һ�������ö�ʱ����һ��ΪTIM1���д˹���
//�ڶ�������:����Ƕȣ���С�Ƕ�Ϊ1/Period��(CCR3=1),���180��(CCR3=Period/2)
voidPWM_Phaseshift(TIM_TypeDef*TIMx,uint16_tphase)
{
TIMx->CCR3=phase;
TIMx->CCR4=(uint16_t)(Period/2-phase);
}
�������������������������� �鿴���� �ظ�
"STM32�ǶԳ�PWMģʽʵ�ֶ�̬���� -"���������
- ��һƪ��PS2���̲��Գ���3 -
- ��һƪ��AT89C51����ESP8266WIFIģ����� -