Ƕ��ʽ����ң��С������(��������) - ��ģ��� -
��Դ�� �����û����������а�Ȩ��ϵ����ɾ����2018-09-28��
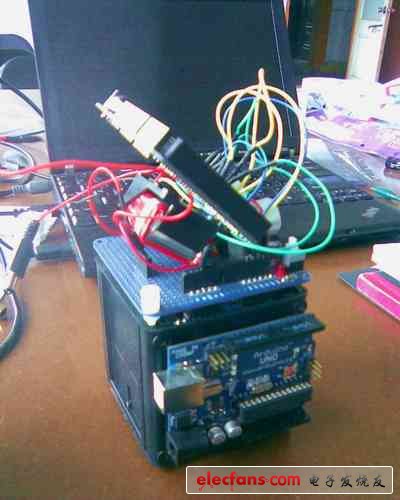
���쿴��һ̨Ƕ��֮�ε�С���������ϵ�֮���˷��Ƶ����ܣ�����ˢ֮�����³���ȴû�����磬û�취���Լ�һ��һ���ԡ����������
����CT1 ����pwm�������ٶ�
����CT2 ǰ�������źţ��ߵ�λת��
����CT3 ���˿����źţ��ߵ�λת��
������������С���ϵ�UNO���ҵ�Ubuntu���������⣬ò��ֻ��Windows�Ǻõģ�Mac OS��ʱҲ������⡣��������ϸ�����Mega 1280��
���������ַ���һ�����⣬����Arduinoʹ��USB�����ʱ���������Ȼ����ʹ�ó��Ͻӳ�����5V��Դʱ������ͻ���ң���ȫû��һ����ɡ��²���������ڵ��ת����������ϵͳ�ĵ�ѹ�½������ṩ�㹻�ĵ�ѹ��Arduino�İ����ϡ�����Ҳ��֮ǰuno���ᷢ���ԭ��û�취����С�����ٽ�һ��9V���ʽ��أ���ΪArduino�ĵ�Դ������������ˡ�
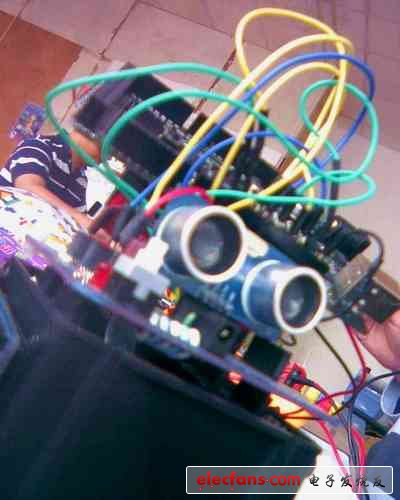
��������������������ǰ�ߣ�����ǰ���������Ǻ��ˣ����䣬Ȼ�������ǰ��һ���ı��ϳ���û���õ��ٶȿ��ơ�����������С���������ӣ��ֻ��ĵģ����Ϳ���
����

���������
����
�����Ҳ���
����

��������һ��
����
�õ��ij�����������
//Author: HE Qichen
//Email: heqichen(a)gaishi.vicp.net
//Website: http://gaishi.vicp.net
//Date: 2011-5-1
int status;
#define LEFT_SPEED 6
#define LEFT_FORWARD 7
#define LEFT_BACKWARD 8
#define RIGHT_SPEED 10
#define RIGHT_FORWARD 11
#define RIGHT_BACKWARD 12
#define ULTRASONIC_ECHO 3
#define ULTRASONIC_TRIG 4
#define NORMAL_SPEED 100
#define STOP_SPEED 0
void setup()
{
Serial.begin(9600);
setupMove();
setupUltrasonic();
}
void loop()
{
unsigned int d;
moveForward();
d = readDistance();
Serial.println(d, DEC);
if (d < 700)
{
moveBackward();
delay(500);
turnLeft();
delay(200);
}
}
void moveForward()
{
analogWrite(LEFT_SPEED, NORMAL_SPEED);
digitalWrite(LEFT_BACKWARD, LOW);
digitalWrite(LEFT_FORWARD, HIGH);
analogWrite(RIGHT_SPEED, NORMAL_SPEED);
digitalWrite(RIGHT_BACKWARD, LOW);
digitalWrite(RIGHT_FORWARD, HIGH);
}
void moveBackward()
{
analogWrite(LEFT_SPEED, NORMAL_SPEED);
digitalWrite(LEFT_BACKWARD, HIGH);
digitalWrite(LEFT_FORWARD, LOW);
analogWrite(RIGHT_SPEED, NORMAL_SPEED);
digitalWrite(RIGHT_BACKWARD, HIGH);
digitalWrite(RIGHT_FORWARD, LOW);
}
void turnLeft()
{
analogWrite(LEFT_SPEED, NORMAL_SPEED);
digitalWrite(LEFT_BACKWARD, HIGH);
digitalWrite(LEFT_FORWARD, LOW);
analogWrite(RIGHT_SPEED, NORMAL_SPEED);
digitalWrite(RIGHT_BACKWARD, LOW);
digitalWrite(RIGHT_FORWARD, HIGH);
}
void turnRight()
{
analogWrite(LEFT_SPEED, NORMAL_SPEED);
digitalWrite(LEFT_BACKWARD, LOW);
digitalWrite(LEFT_FORWARD, HIGH);
analogWrite(RIGHT_SPEED, NORMAL_SPEED);
digitalWrite(RIGHT_BACKWARD, HIGH);
digitalWrite(RIGHT_FORWARD, LOW);
}
void moveStop()
{
analogWrite(LEFT_SPEED, STOP_SPEED);
digitalWrite(LEFT_BACKWARD, LOW);
digitalWrite(LEFT_FORWARD, LOW);
analogWrite(RIGHT_SPEED, STOP_SPEED);
digitalWrite(RIGHT_BACKWARD, LOW);
digitalWrite(RIGHT_FORWARD, LOW);
}
void setupMove()
{
pinMode(LEFT_SPEED, OUTPUT);
pinMode(LEFT_FORWARD, OUTPUT);
pinMode(LEFT_BACKWARD, OUTPUT);
pinMode(RIGHT_SPEED, OUTPUT);
pinMode(RIGHT_FORWARD, OUTPUT);
pinMode(RIGHT_BACKWARD, OUTPUT);
analogWrite(LEFT_SPEED, STOP_SPEED);
digitalWrite(LEFT_FORWARD, LOW);
digitalWrite(LEFT_BACKWARD, LOW);
analogWrite(RIGHT_SPEED, STOP_SPEED);
digitalWrite(RIGHT_FORWARD, LOW);
digitalWrite(RIGHT_BACKWARD, LOW);
}
unsigned int readDistance()
{
int duration;
digitalWrite(ULTRASONIC_TRIG, LOW);
delayMicroseconds(2);
digitalWrite(ULTRASONIC_TRIG, HIGH);
delayMicroseconds(5);
digitalWrite(ULTRASONIC_TRIG, LOW);
// The same pin is used to read the signal from the PING))): a HIGH
// pulse whose duration is the time (in microseconds) from the sending
// of the ping to the reception of its echo off of an object.
duration = pulseIn(ULTRASONIC_ECHO, HIGH);
return duration;
}
void setupUltrasonic()
{
pinMode(ULTRASONIC_TRIG, OUTPUT);
pinMode(ULTRASONIC_ECHO, INPUT);
digitalWrite(ULTRASONIC_TRIG, LOW);
}�������������������������� �鿴���� �ظ�
"Ƕ��ʽ����ң��С������(��������) - ��ģ��� -"���������
��������
- ģ�⼯�ɵ�·�IJ��Լ���-ģ�����-
- ��γ�Ϊ��ɫ��ģ���ʦ:���ָ�����ģ�����-ģ���
- ���ģ�������MEMS��˷��������-ģ�����-
- �����¶ȼƵ�ģ�ⲿ�ֵ�·ͼ-ģ�����-
- �����ⲿ�ж�ʵ��ģ������ݵ��շ�-ģ�����-
- ������/�����̻���ɡ�ģ��뵼��ӭ��ɳ�������-ģ��
- TI�߾���ʵ�������߿γ� �����ɫ����ģ����ƴ���-ģ
- ģ��ʾ����������ʾ����������-ģ�����-
- ������PLC���ڷ�ģ�����������-ģ�����-
- �û���ź�ʾ����̽��ģ��������ź�-ģ�����-