����CAN���ߵĵ�������ϵͳ��Ӳ����� - ��ģ��� -
ժ Ҫ��Ϊ���������е��ݿ���ϵͳ��������һ����LPC2294 Ϊ����оƬ����������ϵͳ����ơ�����������ռʽ������ʵʱ����ϵͳ��C/OS Ϊƽ̨��ʵ���˵�������ϵͳ�е�����ɼ������ȷ��䡢CAN ͨ�š��˵����������Ӳ��������LPC2294 �����ϣ�ʵ�������Ƶ��������ͨ�����������巴���IJɼ�����������������������ȡ�
����1 ����
�������ų��л�������ҵ���ٷ�չ���߲㽨�������ܽ�������ӿ�ֶԵ��ݿ�������������µ�Ҫ�����ͬʱ MCU ���ֳ��������ķ�չΪ���ݿ���ϵͳ���������ṩ�����������ִ����ݿ���ϵͳ�ڰ�ȫ�ԡ��ȶ��ԡ����Ի���Ҫ����ߣ���ԭ��ϵͳ��ͨ�ŷ�ʽ�͵�����Ʒ�ʽ�ȷ����������Ҳ�Ե���Ϊ��Ҫ��
������ͨ�ŷ�ʽ�ϣ�CAN ������������ı���RS485 �����ڵ��ݿ�����ֻ�ܹ������ӽṹ��ͨ�����硢ȱ�������ٲ���ʵʱ��ӦЧ��������ȷ����ȱ�㣬��Ҳʹ�����ִ����ݿ���ϵͳ�����ʱ������һЩ�����������źŽ�����������ɼ���Ȼ��ͨ��CAN ͨ�Ű���Ч�ź�ֱ�Ӵ��������ϵͳ�������ͼ�������ϵͳ�ĸ���������ϵͳ�İ�ȫ�ԣ��ڵ�������ϣ����ݿ���ϵͳ������˫��ϵͳ�������ϵͳ�뵱ǰ���õ�ģ��������ϵͳ�����Σ�ʹ�ó˿��ڳ�������ʱ���ʸ������������ݿ���ϵͳҲ�õ��˲��ϸı䲢�����ơ�
����2 ϵͳ���
�����ִ����ݵ���ϵͳ�ɵ�������ϵͳ����������ϵͳ�Ͱ�ȫ����ϵͳ��ɣ���ͼ1�������е�������ϵͳ��ҷ���綯�����ٶȷ���װ�ã���ת�����������綯������װ�ã���Ƶ�����͵�Դϵͳ�Ȳ�����ɣ���������ϵͳ���ɵ�������ϵͳ���������ϵͳ��������ʾ���ſ���ϵͳ������ϵͳ�Ȳ�����ɣ���ȫ����ϵͳ�ɹ�Ļ����ͣ����������ȫ������ɡ�
����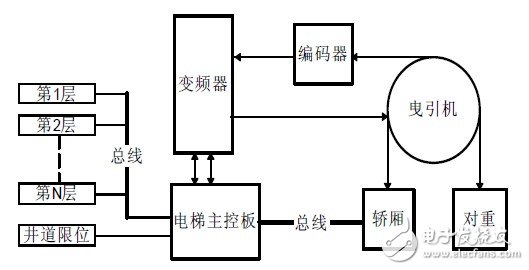
����ͼ1 ���ݿ���ϵͳ�ṹͼ
������������ϵͳ�е�������ϵͳ��Ҫ�ռ����ݾ�����λ�źź͵�������ڽеĺ����źţ�Ȼ�����ϵͳ������ϵͳ�ĵ�ǰ״̬�����ſ���ϵͳ�͵�������ϵͳ��������������ݵ����п��ơ����ڵ��ݵĵ�������ϵͳ�а����˾������ص����á�
����2 ����ϵͳӲ�����
��������ϵͳ��Ӳ�������Ҫ������������CAN ͨ��ģ�顢�������롢�̵���������洢��ģ�顢Һ����ʾģ�顢������·����Դģ�顢��λģ���JTAGģ��ȡ���Ӳ����ͼ��ͼ2 ��ʾ��
����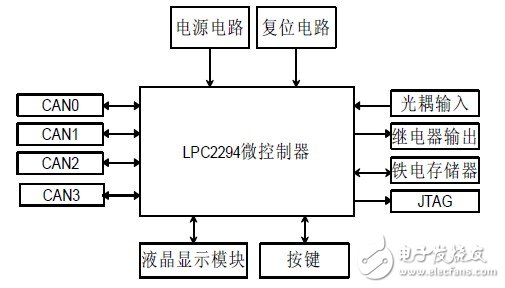
����ͼ2 ����ϵͳ��ģ�顣
����������ϵͳ�У������4 ·CAN �����շ������ֱ����ӵ���������ɼ��塢����ɼ��塢�綯������װ�ã���Ƶ�������Լ�Ⱥ�ص��ݰ塣����ϵͳ����ݵ���ϵͳ��������ϵͳ֮���ͨ�š��������롢�̵��������·�Ĺ�����Ҫ���õ�������ϵͳ�ɼ�������λ�źź����������λ��Һ����ʾģ��Ͱ�����·���Ǹ����ݵ�����Ա��Ƶĵ��Խӿڣ������鿴ϵͳ���в����ı�ϵͳ���в�����������洢����������ϵͳ�������в�����
����2.1 ������ģ��
����LPC2294 �ǻ���һ��֧�����߷�����ٵ�16/32 λARM7TDMI-STM CPU��������16KB ��SRAM ��256 KB �弶����Flash �洢����128 λ���ȵĴ洢���ӿںͶ��صļ��ٽṹʹ32 λ�����ܹ������ʱ�����������С��Դ����ģ���ϸ���Ƶ�Ӧ�ÿ�ʹ��16 λThumb ģʽ�������ģ���ͳ���30%�������ܵ���ʧȴ��С��
��������LPC2294 ��144 �ŷ�װ�����͵Ĺ��ġ����32 λ��ʱ����8 ·10 λADC��4 ·CAN��PWM ͨ���Լ����9 ���ⲿ�ж�ʹ������������������ҵ����Ӧ���Լ�ҽ��ϵͳ���ݴ�ά�����ߡ�LPC2294 ��������76��ʹ�����ⲿ�洢����~����112����Ƭ����GPIO�ڡ����������˸��ٵĴ���ͨ�Žӿڣ�����Ҳ�dz��ʺ���ͨ�����ء�Э��ת�����Լ������������͵�Ӧ�á�
����2.2 CAN ģ���·
�����ڵ��ݿ���ϵͳ�У�������һ����¥��ʹ�ö�̨���ݹ���һ���ɶ�̨������ɵ�Ⱥ��ϵͳ����һ̨���ݿ���ϵͳ�ڲ�����ϵͳҪ�����塢���ٰ�֮�����ͨ�ţ��ڸ�����֮����Ⱥ�ذ帺���ռ���̨��������״̬�͵��ݸ�����Ȼ�������Ӧ���㷨�������ݣ�������ʹ�ÿ���ϵͳ�е�ͨ��ѹ���ϴ�����LPC2294 �ڲ�����4 ·CAN ��������ʹ�øô��������ʺ�Ӧ���ڵ��ݿ���ϵͳ�С�
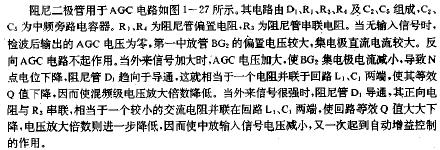
������·CANģ���·����һ�£�����������CAN����������������/�������RD/TD ��CAN �շ���TJA1050 ��Ӧ�Ĺܽ��ϡ�Ϊ�˼����ն˷����ϵͳ��Ӱ�죬��Ҫ��ÿ·CAN ���ߵ�����Զ�˸�����120�����ն˵��衣��ͨ�ŽǶȿ������ݿ���ϵͳ�������������ϵͳΪ���ĵ�CAN ͨ��ϵͳ����ƣ����������ϵͳ����Ƶ�ʱ����ÿ��CAN ���ߵ�CANH ��CANL ֮����������120�����ն˵����DZ�Ҫ�ġ���������ϵͳ�еĹ�����õ���24V �ı���ҵ�õ磬����ǵ���Ԫ�����ij��ܵ�ѹ��Χ����������ڹ���ʩ���н��ߴ����ϵͳ�����ƻ�����Ƶ�ʱ����CANH ��CANL ������������TVS �ܡ���ͼ3 ��ʾ��
����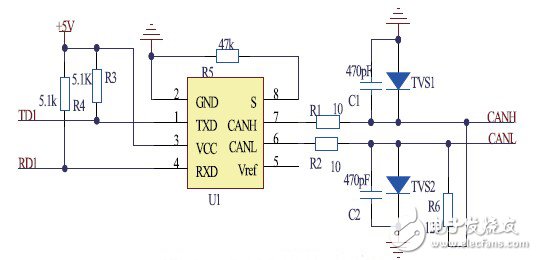
����ͼ3 CAN ģ���·��
����CANH ��CANL �����GND ��ƥ�����C1 ��C2 ������������߿���Ÿ��ŵ����ܡ���Ӧ����Դ���迹��CANH ��CANL �Եصĵ��������һ��RC��ͨ�˲������ڿ����ŵ����ܵ������ϵ��ݵ�ֵӦ�þ����ܴ��ܻ�õ͵Ľ�Ƶ�ʡ���һ������������������ݸ��غ��迹Ϊ�����źŽ�����һ����ͨ�˲����������صĽ�Ƶ��Ҫ�����ݴ���Ƶ�ʸߡ���ʹ����ֵ�����ɽڵ�����������ݴ���Ƶ�ʾ�������TJA1050 ��������迹��Լ��20��������ϵͳ��10���ڵ㣬�ٶ���500kbit/s ����ݵ�ֵ��Ӧ�ó���470pF.
����2.3 ���������·
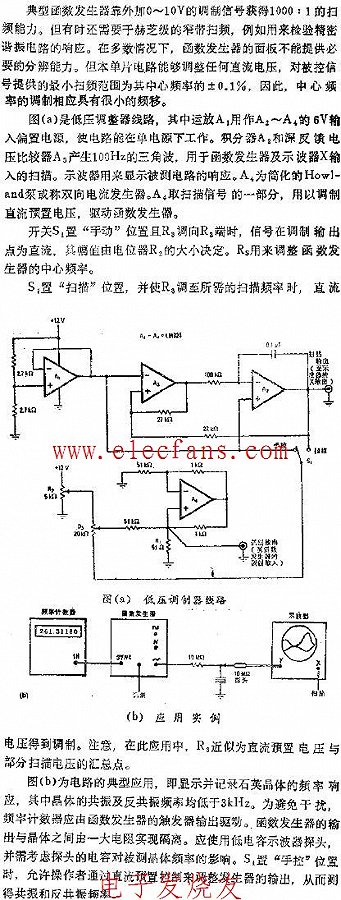
�����ڵ��ݵ�������ϵͳ������ϵͳΪ�˵��ݲ�������ȫ�¹ʣ���ȫ�ȶ������У����Ҫʵʱ�شӵ��ݰ�ȫ����ϵͳ�вɼ����ݾ����źš�����ʵʱ��Ҫ��dz��ߵ����뿪����ֱ��ͨ���������뵽����ϵͳ���翪/������λ����/��ǿ������/����λ����Ļ����������բ�����ȿ������źš�����Ϊ�˼�С�����źŶ���������Ӱ�죬���������˶���Щ�������źţ������˹���������·ԭ��ͼ��ͼ4 ��ʾ��
����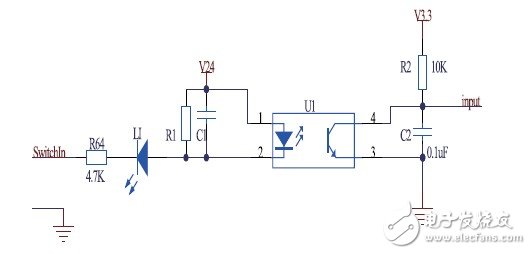
����ͼ4 ���������·��
������Ȼ���ֵĶ�ʵʱ�ź�Ҫ�����ر�ߵ������ź������������ݡ�ֱʻ�����ء����صȣ�����ͨ�������������ٰ���ͬ���ķ�ʽ�ɼ���Ȼ��ͨ��CAN ���ߴ��ݸ�������ϵͳ��
����2.4 �̵��������·
�����ڵ��ݵ����ģ���У�Ϊ�˼�С�ⲿ��·��������ϵͳ��Ӱ�죬��������2803 �����̵����Ŀ����������ʽ�������������/�����������բ���������������վ�ӡ���Դ���������ݸ�����������վ������ָʾ������/����ָʾ�����ڵ���������źţ��������ź����ƿ���ͨ��CAN ���߰��źŴ��ݸ������������ٰ壬Ȼ���������ͬ�̵��������ʽ�����
2.5 ����ģ��
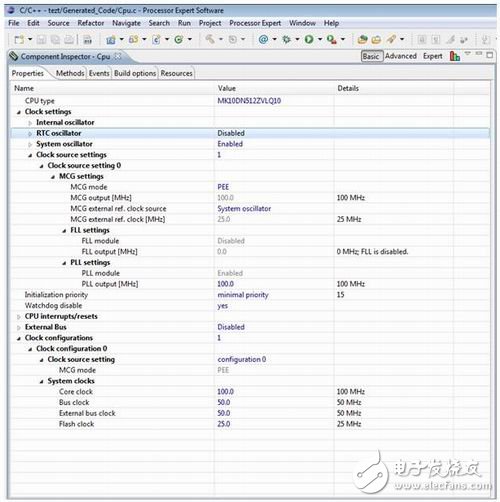
������Դģ�飺����24V ���磬 ��LM2576 ��AS1117-3.3 ���� 5V ��3.3V ��ѹ������ϵͳ�IJ�ͬģ�顣��λģ�飺Ϊʹϵͳ�ܹ��ȶ��ɿ���������λ��·�DZز����ٵģ�����ϵͳ���õ���MAX708�����Ǿ��бȽ������ֶ���λ���롢�����ƽ�����������оƬ��Һ����ʾ�밴��ģ�飺���þ�����İ�����12864����Һ������ƣ��ܹ�����ʾ�˵��ȽϺ����IJ�������ϵͳ����GPIO ���ơ��洢ģ�飺��Ҫ���������û������ĺ�ϵͳ�����в����������û����롢����Ա�������롢�ӱ�Ƶ���ɼ������������ȣ����洢оƬѡ���˻������缼���� 64K λ����ʧ������洢��FM24CL64�������������õ��DZ�����I2C �Ľӿڣ������ܹ��Ϻõ���LPC2294 ���ӡ�
����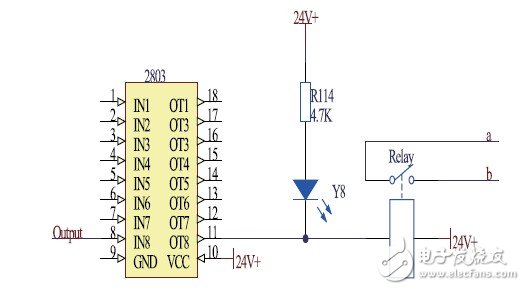
����ͼ5 �̵��������·��
����3 ����ϵͳ�������
��������ϵͳ�������ʱ�����˵�ǰ������keil ���ɿ��������������������ռʽ������ʵʱ����ϵͳ��C/OS Ϊƽ̨ʵ�֣�5���˵�������ϵͳ�ĵ��ȷ��䡢CANͨ�š�Һ����ʾ����������ͼ6 ��ʾ��
����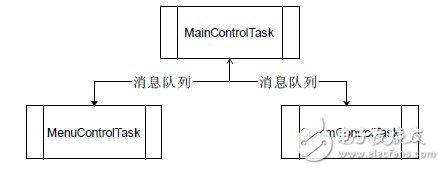
����ͼ6 ϵͳ����ͨ��ͼ��
��������֮��ͨ������Ϣ���к����䷽ʽ����ͨ�š�
��������Ӳ���ӿ��ϸ���LPC2294 оƬ�ֲ��Ӧ�õ���Ҫ�������CAN ģ���������I2C ������ģ�����������GPIO ��ģʽ�İ�����12864 ����Һ������������ʹ���ڦ�C/OS �������������עLPC2294 оƬ������Դ�ľ���ʹ�ã���ֻ��Ҫ������Ӧ�Ľӿں�����������ϵͳ�����������Ķ���
����3.1 ���ص�������
���������ص�����������ɵ�ǰ�ݺ����źŵ����ϣ�Ȼ���ٸ��ݵ�ǰ�ռ�����Ⱥ�������������ź��жϵ�ǰ�ݵ�����״̬�����Զ�״̬������״̬������״̬�ȣ���������ǰ״̬�Ĵ������ڵ��ݴ��ڿɵ��ȵ�״̬�£�������Ӧ�ĵ����㷨��ɶԵ��ݵĺ��ݵĺ������ã���ͨ����Ϣ���к�������CAN ͨ������Һ����ʾ������������ͨ�ţ�������ݵĽ�����
����3.2 CAN ͨ������
ԭ���϶�4 ·CAN ����������Դ����Ϊ��CAN0���ͨ�š�CAN1 ����ͨ�š�CAN2 ��Ƶ��ͨ�š�CAN3Ⱥ����ϵͳͨ�ţ�7�ݡ���ϵͳ�п����������Ͻ�����Ӧ�����ã�Ȼ��ʹ������CAN ������������������ⲿ��ϵͳ������������������ϵͳ������ԣ�Ҳ��������Ա�����˷��㡣��CAN ͨ���������֮ǰ����Ҫ������Ӧ��CAN ��������ʼ����������CAN �������ж�
�������������������������� �鿴���� �ظ�
"����CAN���ߵĵ�������ϵͳ��Ӳ����� - ��ģ��� -"���������
��������
- ģ�⼯�ɵ�·�IJ��Լ���-ģ�����-
- ��γ�Ϊ��ɫ��ģ���ʦ:���ָ�����ģ�����-ģ���
- ���ģ�������MEMS��˷��������-ģ�����-
- �����¶ȼƵ�ģ�ⲿ�ֵ�·ͼ-ģ�����-
- �����ⲿ�ж�ʵ��ģ������ݵ��շ�-ģ�����-
- ������/�����̻���ɡ�ģ��뵼��ӭ��ɳ�������-ģ��
- TI�߾���ʵ�������߿γ� �����ɫ����ģ����ƴ���-ģ
- ģ��ʾ����������ʾ����������-ģ�����-
- ������PLC���ڷ�ģ�����������-ģ�����-
- �û���ź�ʾ����̽��ģ��������ź�-ģ�����-