ARM7单片机(学习ing)―(一)、输入/输出端口GPIO编程―01 -
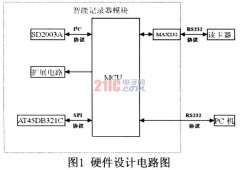
[导读]一、输入/输出端口GPIO编程一―(01)、一位数码管静态显示(通过74HC595实现)1、管脚连接模块首先介绍一下LPC2106的相关的管脚~~特性:可以实现独立的管脚配置应用:管脚连接模块的用途是将管脚配置为需要的功能(这
一、输入/输出端口GPIO编程
本文引用地址: http://www.21ic.com/app/mcu/201808/781642.htm
一―(01)、一位数码管静态显示(通过74HC595实现)
1、管脚连接模块
首先介绍一下LPC2106的相关的管脚~~
特性:可以实现独立的管脚配置
应用:管脚连接模块的用途是将管脚配置为需要的功能(这一章节主要就是介绍GPIO功能~~别的会在接下来的章节中分别予以介绍~~)
描述:管脚连接模块可以使所选管脚具有一个以上的功能。配置寄存器控制多路开关来连接管脚与片内外设。外设在激活和任何相关只读使能之前必须连接到适当的管脚。任何使能的外设功能如果没有映射到相应的管脚,则被认为是无效的。
寄存器的描述:
管脚连接模块包括两个寄存器:

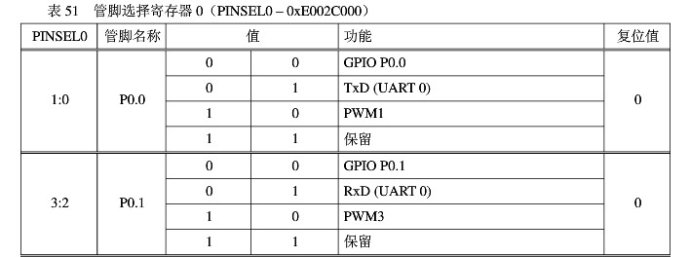
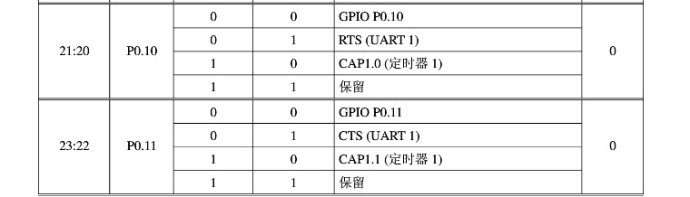
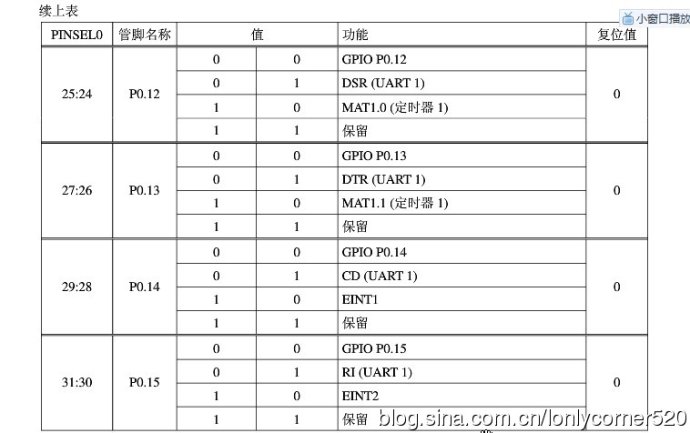
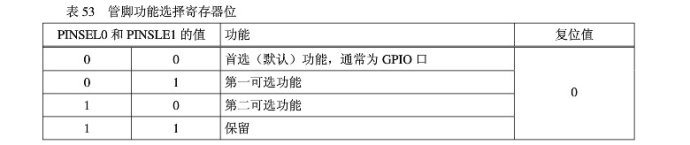
管脚功能寄存器0:(PINSEL0)
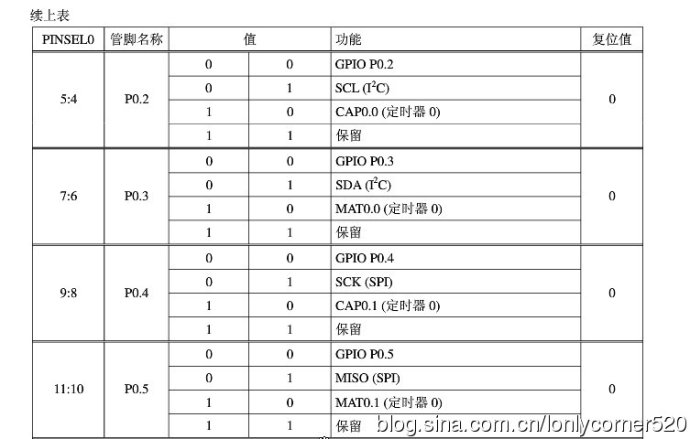
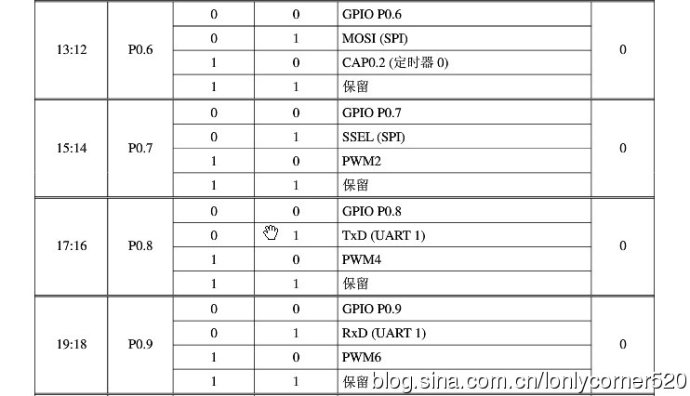
PINSEL0寄存器按照下表当中的设定来控制管脚的功能。
IODIR寄存器中的方向控制位只有在管脚选择为GPIO的功能时才有效(也就是本章要讲述的)。对于其它功能,方向是自动控制的。
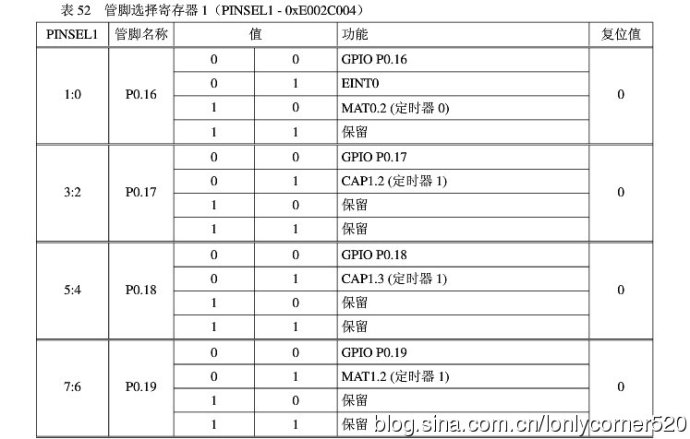
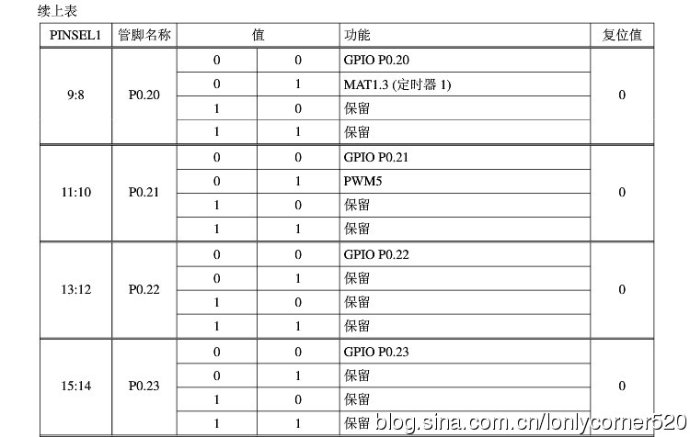
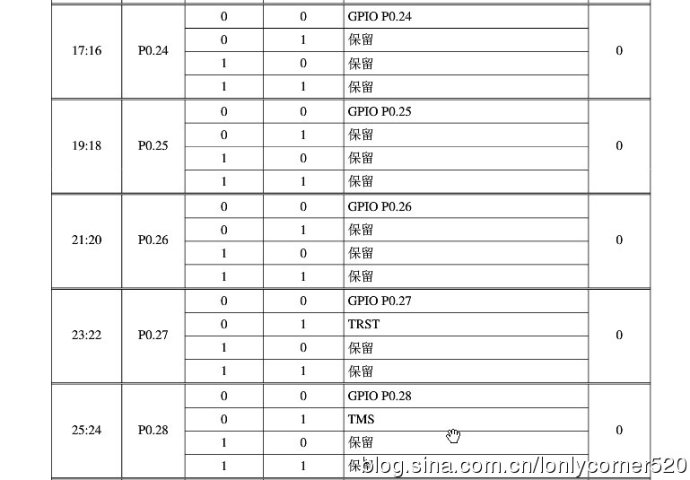
管脚功能寄存器1:(PINSEL1)
PINSEL1寄存器按照下表来设定控制管脚的功能。
IODIR寄存器中的方向控制位只有在管脚选择GPIO功能时才有效。对于其它功能,方向是自动控制的。
在复位时拉低DBGSEL时,只要管脚P0.17-P0.31的功能控制有效。(这个还真的不知道哎~~ )
)


管脚功能寄存器值:
PINSEL寄存器控制器件管脚的功能。如下图。
每一对寄存器位对应一个特定的器件管脚。
只有当管脚选择为GPIO功能时,IODIR寄存器的方向控制位才有效。
其它功能的方向是自动控制的。
每个派生期间通常具有不同的管脚分布,因此每个管脚可能有不同的功能。
2、GPIO
特性:
1)单个位的方向控制
2)单独控制输出的置位和清零
3)所有I/0口在复位后默认为输入
应用:
1)通用I/0口
2)驱动LED或者其他指示器
3)驱动片外器件
4)检测数字输入
管脚描述:
寄存器描述:
GPIO包含4个寄存器,如下表:
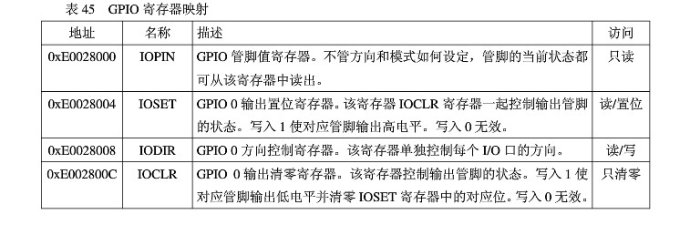
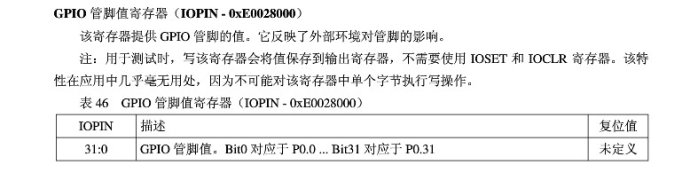
GPIO引脚值寄存器IOPIN:
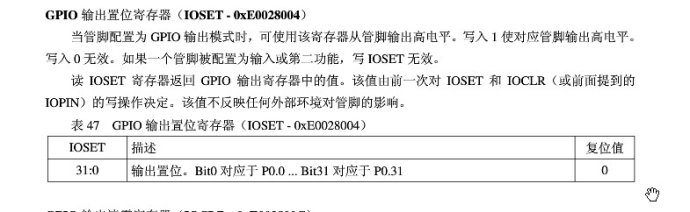
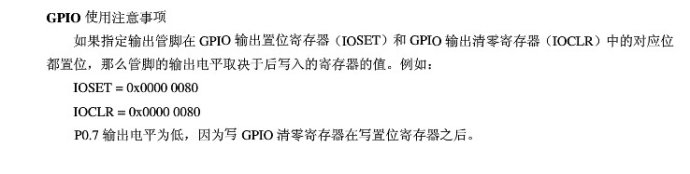
GPIO输出置位寄存器IOSET:
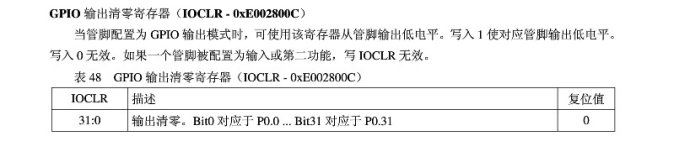
GPIO输出清零寄存器:
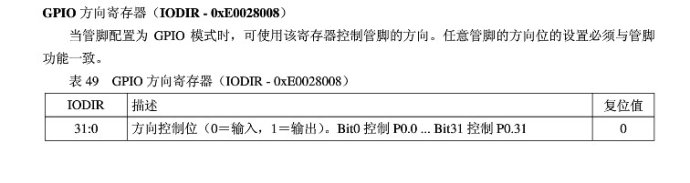
GPIO方向寄存器:
好了,就这么点吧~~
然后就是今天要做的实验:
一位数码管的静态显示
晕了~~用IAR for ARM就是调不好~~
shit~~
然后就换用了Keil~~
浪费我大把时间了~~
早知道就早用Keil了~~
回头还得再调试一下IAR~~
 ~~
~~
好了,发图~~
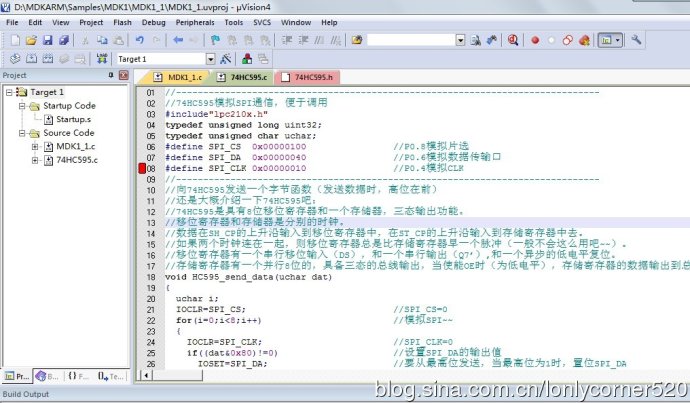
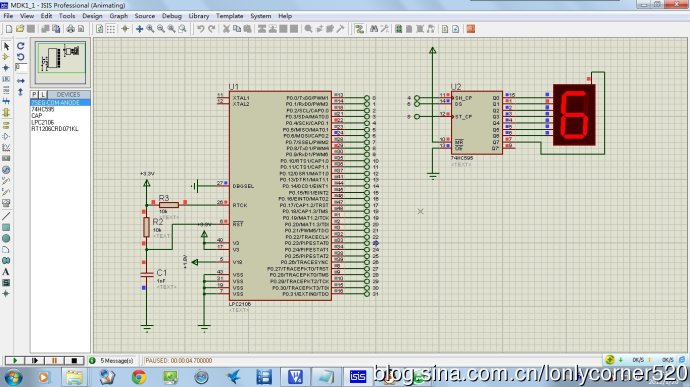
然后就是程序了~~
MDK1_1.c(先是主程序吗~~你懂得)
//------------------------------------------------------------------------------
//LED数码管显示
//通过I/O模拟同步串行接口与74HC595进行连接,控制74HC595驱动LED数码管显示
//------------------------------------------------------------------------------
#include"lpc210x.h"
typedef unsigned long uint32;
typedef unsigned char uchar;
#define SPI_IO0x00000150//SPI接口的I/O设置字
uchar const seg[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0.82,0xf8,
0x80,0x90,0x88,0x83,0xc6,0xa1,0x86,0x8e};
//------------------------------------------------------------------------------
//延时函数
void delay(uint32 z)
{
uint32 i;
for(;z>0;z--)
for(i=0;i<50000;i++);
}
//------------------------------------------------------------------------------
//main
int main()
{
uchar i;
PINSEL0=0X00000000;
PINSEL1=0X00000000;//设置左右引脚连接GPIO
IODIR=SPI_IO;//设置SPI控制口为输出~~由于这是模拟的,所以需要自己设置方向位
while(1)
{
for(i=0;i<16;i++)
{
HC595_send_data(seg[i]);
delay(1);
}
}
}
74HC595.c
//------------------------------------------------------------------------------
//74HC595模拟SPI通信,便于调用
#include"lpc210x.h"
typedef unsigned long uint32;
typedef unsigned char uchar;
#define SPI_CS0x00000100//P0.8模拟片选
#define SPI_DA0x00000040//P0.6模拟数据传输口
#define SPI_CLK 0x00000010//P0.4模拟CLK
//------------------------------------------------------------------------------
//向74HC595发送一个字节函数(发送数据时,高位在前)
//还是大概介绍一下74HC595吧:
//74HC595是具有8位移位寄存器和一个存储器,三态输出功能。
//移位寄存器和存储器是分别的时钟。
//数据在SH_CP的上升沿输入到移位寄存器中,在ST_CP的上升沿输入到存储寄存器中去。
//如果两个时钟连在一起,则移位寄存器总是比存储寄存器早一个脉冲(一般不会这么用吧~~)。
//移位寄存器有一个串行移位输入(DS),和一个串行输出(Q7’),和一个异步的低电平复位。
//存储寄存器有一个并行8位的,具备三态的总线输出,当使能OE时(为低电平),存储寄存器的数据输出到总线。
void HC595_send_data(uchar dat)
{
uchar i;
IOCLR=SPI_CS;//SPI_CS=0
for(i=0;i<8;i++)//模拟SPI~~
{
IOCLR=SPI_CLK;//SPI_CLK=0
if((dat&0x80)!=0)//设置SPI_DA的输出值
IOSET=SPI_DA;//要从最高位发送,当最高位为1时,置位SPI_DA
else
IOCLR=SPI_DA;//当最高位为0时,清零SPI_DA
dat<<=1;//dat循环左移一位
IOSET=SPI_CLK;//SPI_CLK为1,一个脉冲上升沿,将数据移入移位寄存器
}
IOSET=SPI_CS;//SPI_CS=1,输入到存储寄存器中,由于片选一直为低,所以直接就输出显示的数据
}
查看评论 回复