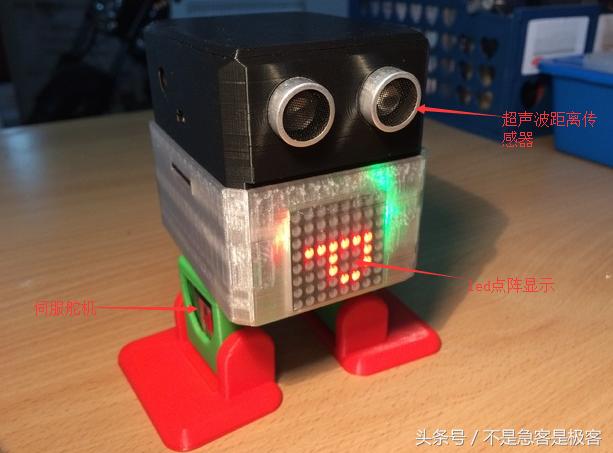
DIY一个好玩的机器人,电子控制部分采用Atmel的AVR
DIY一个好玩的机器人,电子部分采用Atmel的AVR 8位单片机做主控,型号:Nano V3.0 ATmega328。
有的说“两个小时,也能制作一个~~小机器人”,这个有点难,制作个塑料外壳都要几个小时。
需要你具备以下技能
一定的创造力
推理能力
解决问题的能力
懂的一点机械设计
传动动力电机相关
及程序设计(当然可以用图形编程,但必须有程序化思维)
还有比较好的动手能力
下面开始制作,先说一下需要的工具:
迷你usb线,用于从电脑下载程序

HC-SR04超声波传感器。

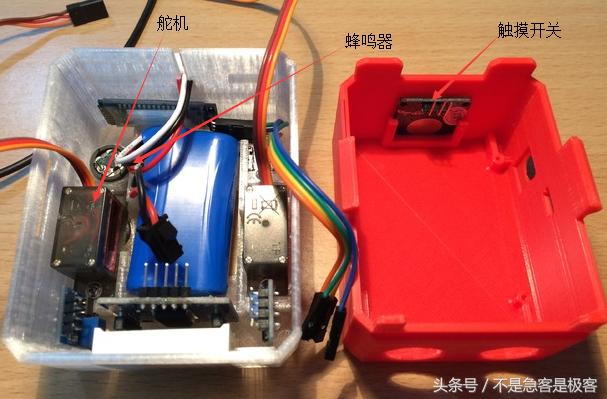
迷你伺服MG90 9g x4(每个应配备2个尖头螺钉和一个小螺钉,还有悬臂,用于连接腿和脚)。舵机控制程序地址:https://github.com/netlabtoolkit/VarSpeedServo

无源蜂鸣器12mm 5V

一个触摸传感器,一个光线检测传感器,如图

带有模拟输出的声音传感器(俗称话筒或麦克风),为了可以让机器人能听见声音,

蓝牙模块HC-05或HC06或BLE主从一体都可以

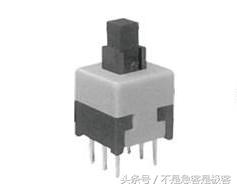
8.5x8.5mm自锁开关
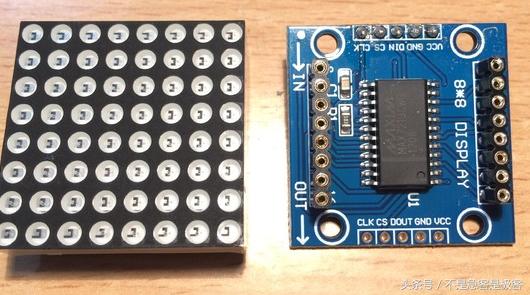
8*8的LED矩阵模块和MAX7219led驱动模块MAX7219是MAXIM公司生产的串行输入/输出共阴极数码管显示驱动芯片,一片MAX7219可驱动8个7段(包括小数点共8段)数字LED、LED条线图形显示器、或64个分立的LED发光二级管。
这次没有向上次diy那样使用18650电池组。而是使用了14500,
14500与5号电池大小一样,直径14mm,高50mm,而18650电池比5号电池大,直径18mm,高65mm 14500容量小,18650容量大,常见的可达2600mah,这里使用两节14500电池组。体积小一点

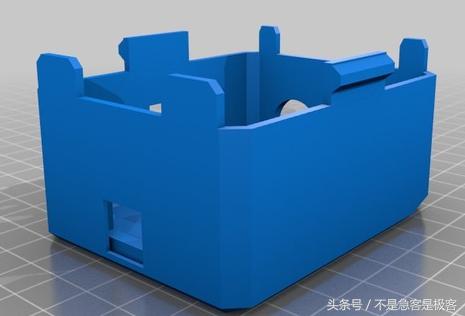
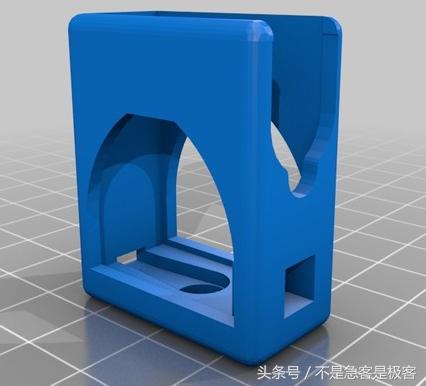
外观3D塑料件如图:
头
腿x2
脚x2
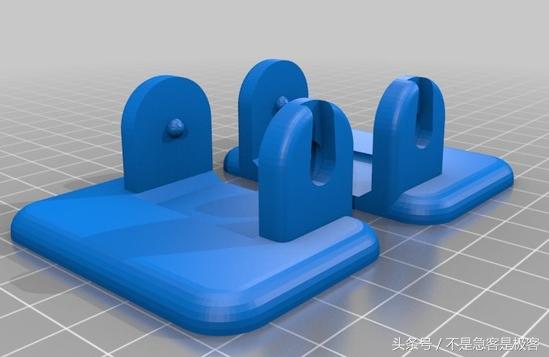
打印零件如图:

组装如图
头部组装
头底部和侧面

腿部组装

和以前一下样,来个成品图