
单片机菜鸟自学记
一天看到同学在玩节奏大师游戏,不知道为啥就想到用单片机自动玩这个。但是想想节奏大师这个游戏难操作且不好识别,于是想到相似的别踩白块儿这个游戏。
一有想法马上开始做,大家都在紧张的备战期末考试,我这是冒着挂科的风险在玩单片机啊!最先想到的是用Arduino做,这样最快。于是就开始做吧:
花了一晚上焊了个板子

用四个光敏电阻检测游戏里的黑块
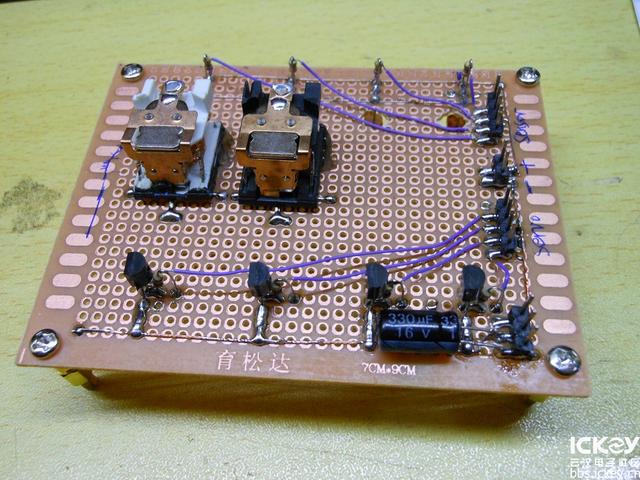
一开始打算用舵机去动作触屏,后来觉得舵机太慢了,就改成了电磁铁(把继电器拆了得到~)
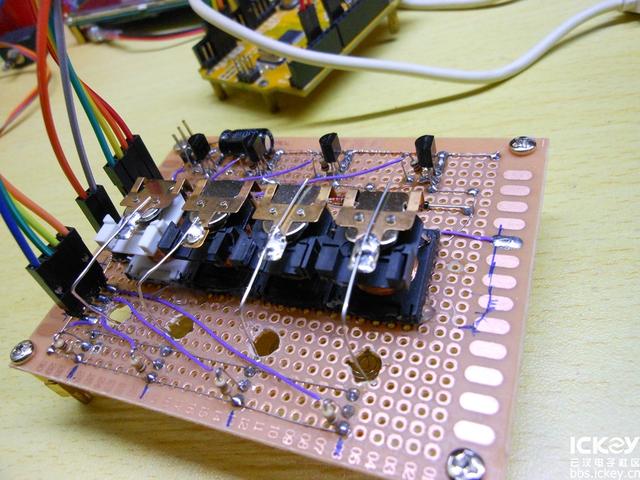
再来一张
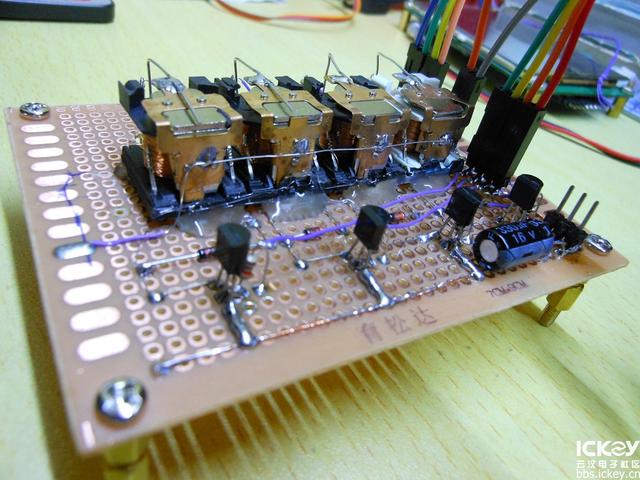
四个全部就位了~

实在是找不到电容笔,于是把导线弄成这样凑合触屏吧(实际使用有时候不灵)
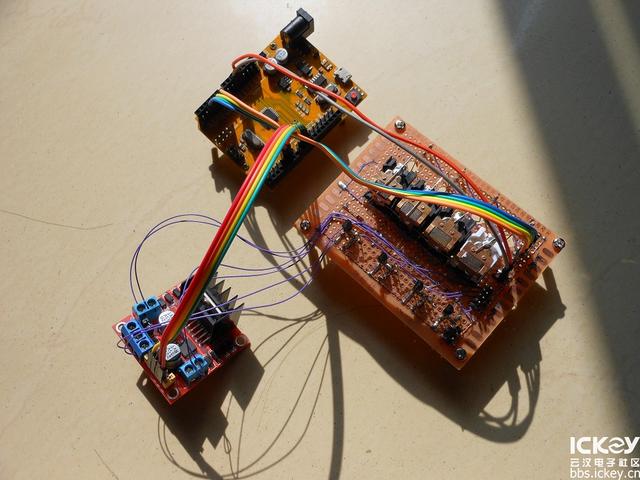
全家福在此
硬件差不多就是这样啦~ 接下来写个程序试试读取光敏电阻

数据还算正常,不过不够均衡,所以程序上简单的处理了一下数据,全部代码如下:
/******************************************************
*
*
* 说明:舵机玩别踩白块儿游戏程序
* 日期:2017-01-08
* 作者:TDA2030
* 硬件:Arduino uno板
*
*
*******************************************************/
#include
#define u16 unsigned int
#define u8 unsigned char
//光敏电阻数据校准值,调试得出具体数值
#define S1_ADJ (0)
#define S2_ADJ (20)
#define S3_ADJ (-47)
#define S4_ADJ (-120)
#define C_V 620 //触发动作阀值
#define PRESS_VAL 1//按下所对应的值
#define BOUNCE_VAL 0//弹起所对应的值
//传感器端口定义
#define SENSOR_PORT1 0 // analog pin used to connect the potentiometer
#define SENSOR_PORT2 1
#define SENSOR_PORT3 2
#define SENSOR_PORT4 3
//舵机端口定义
#define SERVO_PORT4 5
#define SERVO_PORT3 6
#define SERVO_PORT2 9
#define SERVO_PORT1 10
void setup()
{
Serial.begin(115200);
while (!Serial) {
; // wait for serial port to connect. Needed for Leonardo only
}
Serial.println("*****************************************n");
Serial.println(" * Play the game by MCUn");
Serial.println(" * Author: TDA2030n");
Serial.println(" * Date: 2017/01/08nn");
Serial.println("*****************************************nn");
pinMode(SENSOR_PORT1,INPUT);
pinMode(SENSOR_PORT2,INPUT);
pinMode(SENSOR_PORT3,INPUT);
pinMode(SENSOR_PORT4,INPUT);
pinMode(SERVO_PORT1,OUTPUT);
pinMode(SERVO_PORT2,OUTPUT);
pinMode(SERVO_PORT3,OUTPUT);
pinMode(SERVO_PORT4,OUTPUT);
}
//全局变量定义
u16 sv1,sv2,sv3,sv4;
u8 flag1,flag2,flag3,flag4;
u16 time1,time2,time3,time4;
u16 core=0;
u16 MAX1_TIME = 230; //最大按下时间定义
u16 MAX2_TIME = MAX1_TIME+300; //免检测时间定义
void loop()
{
//读取光敏电阻AD值
sv1=analogRead(SENSOR_PORT1)+S1_ADJ;
sv2=analogRead(SENSOR_PORT2)+S2_ADJ;
sv3=analogRead(SENSOR_PORT3)+S3_ADJ;
sv4=analogRead(SENSOR_PORT4)+S4_ADJ;
//串口打印数据,调试时用
Serial.print("sensor1:");
Serial.println(sv1,DEC);
Serial.print("sensor2:");
Serial.println(sv2,DEC);
Serial.print("sensor3:");
Serial.println(sv3,DEC);
Serial.print("sensor4:");
Serial.println(sv4,DEC);
Serial.println("n");
delay(200);
//-------当得分大于一定后加快速度按下
// if(core>100)
// {
// MAX1_TIME = 200;
// MAX2_TIME = MAX1_TIME+200;
// }
//判断是否大于阀值,执行按下并标识位
if(flag1==0&&sv1>C_V)
{
digitalWrite(SERVO_PORT1,PRESS_VAL);
flag1=1;core++;
}
if(flag2==0&&sv2>C_V)
{
digitalWrite(SERVO_PORT2,PRESS_VAL);
flag2=1;core++;
}
if(flag3==0&&sv3>C_V)
{
digitalWrite(SERVO_PORT3,PRESS_VAL);
flag3=1;core++;
}
if(flag4==0&&sv4>C_V)
{
digitalWrite(SERVO_PORT4,PRESS_VAL);
flag4=1;core++;
}
/*在按下一段时间后自动弹起,不管是不是还大于阀值,
另外还要等待一段时间不检测,防止一个黑块多次按下*/
if(flag1==1)
{
time1++;
if(time1>MAX1_TIME)//大于了弹起时间,则自己弹起
{
digitalWrite(SERVO_PORT1,BOUNCE_VAL);
if(time1>MAX2_TIME)//大于了免检测时间,复位标志位,以开始重新判断阀值
{time1=0;flag1=0;}
}
}
if(flag2==1)
{
time2++;
if(time2>MAX1_TIME)
{
digitalWrite(SERVO_PORT2,BOUNCE_VAL);
if(time2>MAX2_TIME)
{time2=0;flag2=0;}
}
}
if(flag3==1)
{
time3++;
if(time3>MAX1_TIME)
{
digitalWrite(SERVO_PORT3,BOUNCE_VAL);
if(time3>MAX2_TIME)
{time3=0;flag3=0;}
}
}
if(flag4==1)
{
time4++;
if(time4>MAX1_TIME)
{
digitalWrite(SERVO_PORT4,BOUNCE_VAL);
if(time4>MAX2_TIME)
{time4=0;flag4=0;}
}
}
}
做完感觉速度很慢,后来还测试了一下游戏的街机模式,发现最多能玩到160分,还没我同学玩的快呢。
简单分析了一下,主要是由于只有一个光敏电阻传感器,不能准确知道黑块走哪了,程序没法在时间上准确控制
所以我就想到了两个方法:
一是采用摄像头采集图像,并进行简单处理,来控制。
开始动手,试了一下用STM32F103驱动不带FIFO的OV7670摄像头,速度慢的不要不要的,大概每秒只有一两帧

这样的速度肯定不行啊,于是又找到了一个学长的视觉识别openmv板:
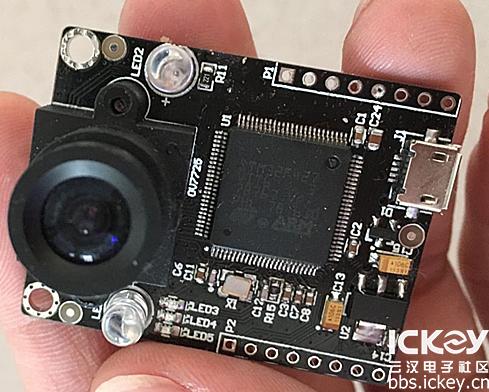
斑点识别
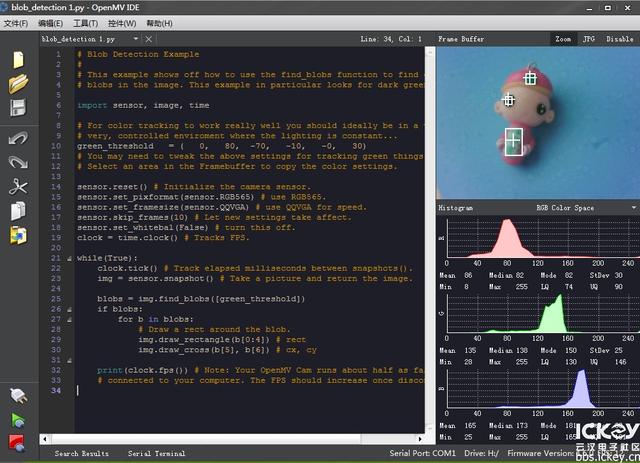
STM32F427芯片 180MHZ频率 加上 硬件 DCMI接口,这下达到了20帧每秒左右
但是由于使用Python编程,试了一下不太会搞,弄了半天可以识别出手机屏幕上的黑块了,但是干扰太大了,不稳定。
于是放弃这个方法了
我想到的第二个方法就是再加4个光敏电阻在前面,提前预知黑块。
这样Arduino的AD口就不够了,得换其他单片机,加上学校没几天就要封校了,差不多也要收拾收拾回家了,那就到此为止吧。
了解更多源代码,视频,请关注云汉电子社区微信公众号ickeybbs。
查看评论 回复
| 游客 | 2018-08-26 08:24:12 |
| 看焊接搞得跟很漂亮 | |
| 游客 | 2018-08-25 10:13:12 |
| 有点牛,就是有个缺点没有坚持到底,事情只做了一半 | |
