基于stm32CubeMX和keil5的stm32f103学习编程 -
[导读]
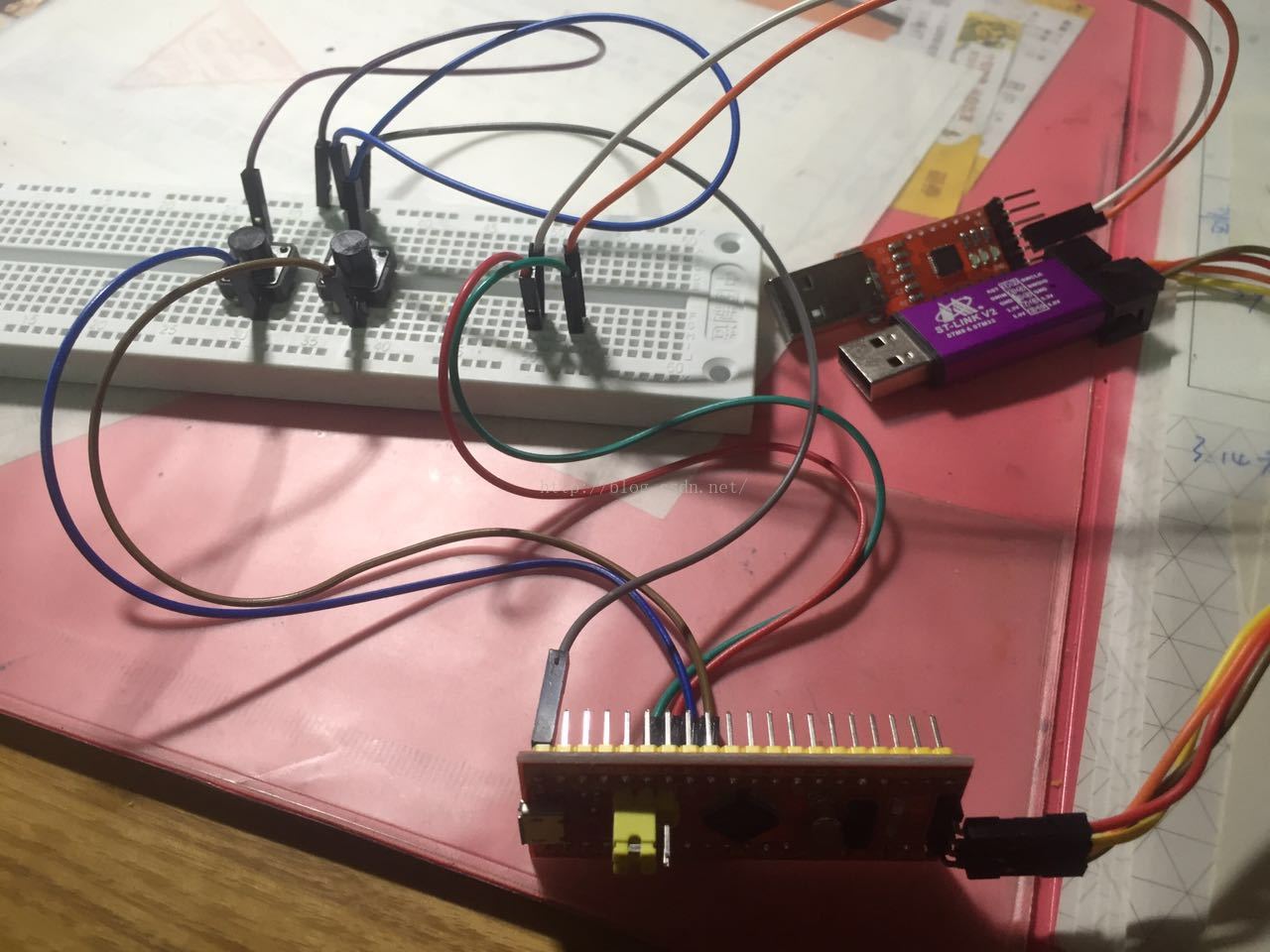
0. 准备先用st-link连接stm32核心板与PC,用于烧录St-linkStm323.3V3.3VGNDGNDSWDIODIOSWCLKDCLK再用USB串口板连接,用于查看串口输出USBStm32RXTX(A9)TXRX(A10)安装完成驱动并连接好以后,进入设备管理
0. 准备
本文引用地址: http://www.21ic.com/app/mcu/201806/764676.htm
先用st-link连接STM32核心板与PC,用于烧录
再用USB串口板连接,用于查看串口输出
安装完成驱动并连接好以后,进入设备管理器可以看到它们都已被识别。
打开putty.exe,选择串口连接,用于查看之后的串口输出。

1. 编写Cube程序,配置UART0为9600,8n1,上电后向串口输出“Hello”,在PC上通过串口软件观察结果;
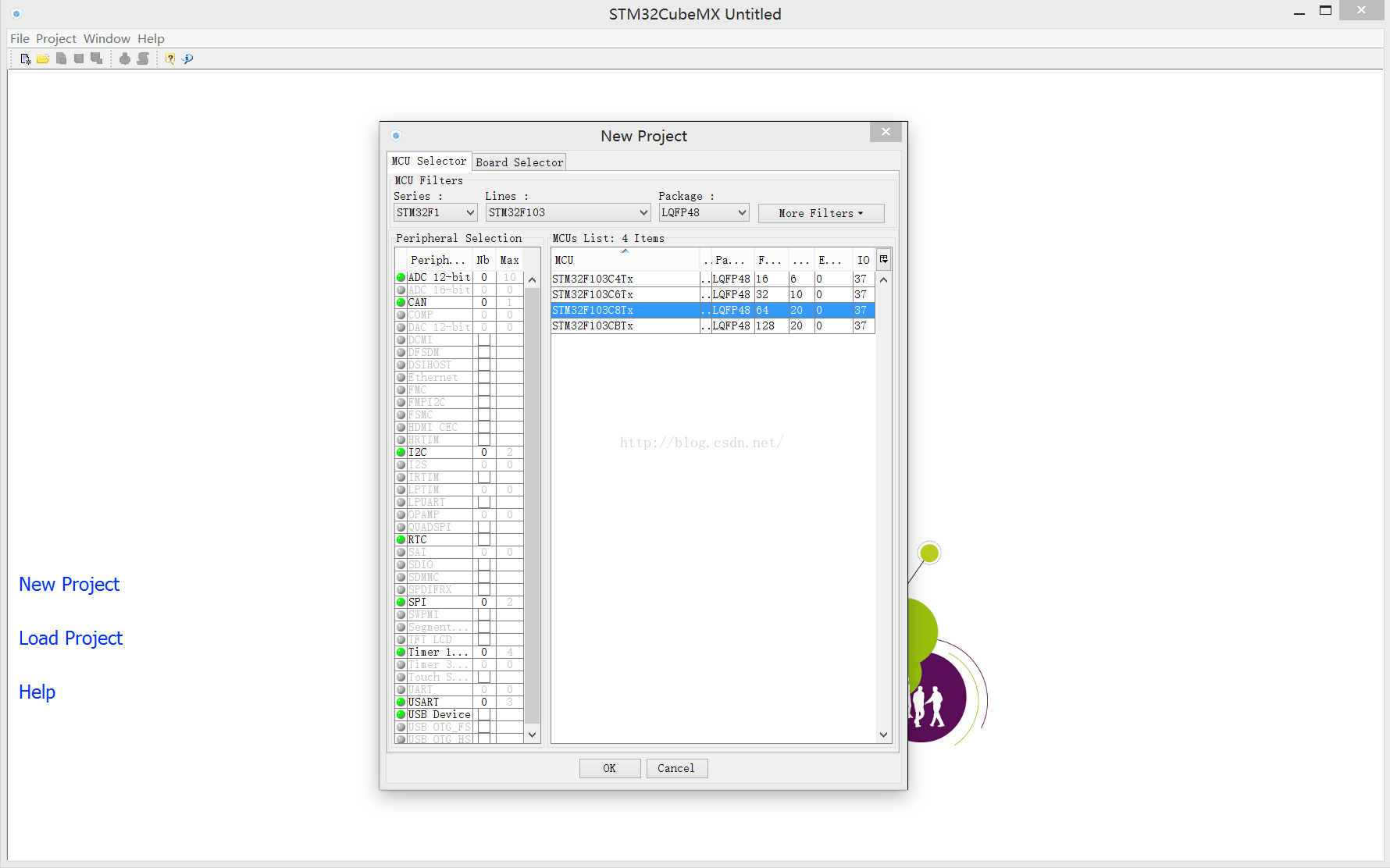
安装完成并打开CubeMX软件,选择New Project,选择STM32F103C8Tx并点击ok。
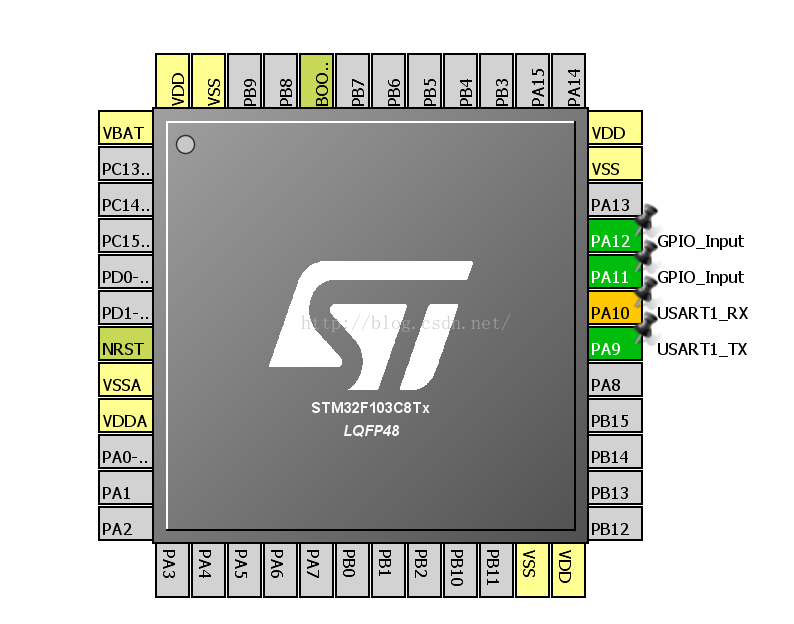
进入工程界面以后我们可以看到右边有芯片的引脚图,如下所示。我们点击PA11和PA12,选择GPIO_Input(后面按钮用)。然后在左边的配置中将UART1模式定为Half-Duplex。
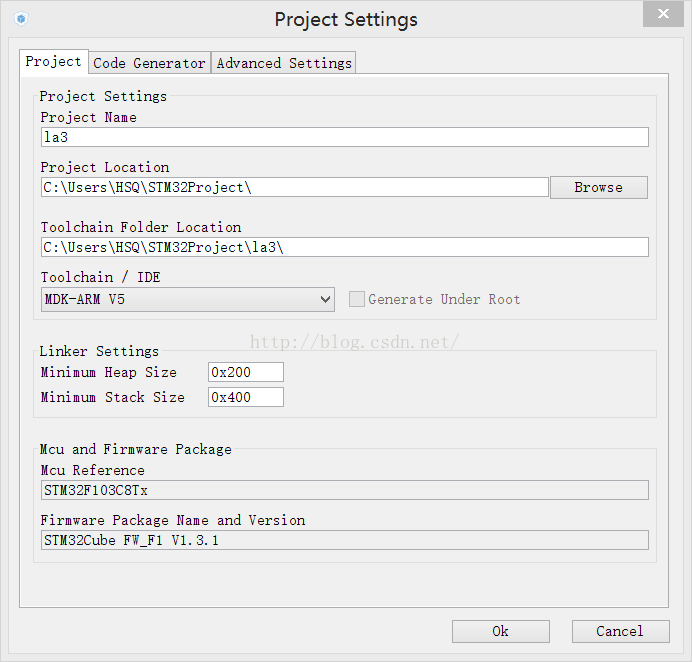
在生成代码前,进入工程配置。填写工程名、保存路径等,同时选择IDE为MDK-ARM V5。
设置完成后点击生成代码。注意如果没安装库文件的话会提示下载,但通过软件的自动更新速度无比的慢,而且经常下一半会挂,所以可以在网络上下载后自助导入。
生成代码后弹出如下对话框,选择open。

进入keil5以后可以看到我们的工程文件目录如左栏所示。注意打开前会弹出Pack installer下载对应的编程工具,选择stm32f1xx系列即可。下载有点慢,可以自己下载或拷贝他人后导入,路径为 c:/keil v5/ARM/Pack

然后进入main.c对UART进行配置为9600,8n1,代码如下所示。
voidUART0_Init(UART_HandleTypeDef*UartHandle){
UartHandle->Instance=USART1;
UartHandle->Init.BaudRate=9600;
UartHandle->Init.WordLength=UART_WORDLENGTH_8B;
UartHandle->Init.StopBits=UART_STOPBITS_1;
UartHandle->Init.Parity=UART_PARITY_NONE;
UartHandle->Init.HwFlowCtl=UART_HWCONTROL_NONE;
UartHandle->Init.Mode=UART_MODE_TX_RX;
HAL_UART_Init(UartHandle);
}
在main函数中填上下面两行代码-
UART0_Init(&UartHandle);
以及输出hello的代码
HAL_UART_Transmit(&UartHandle,(uint8_t*)”hellorn”,7,500);
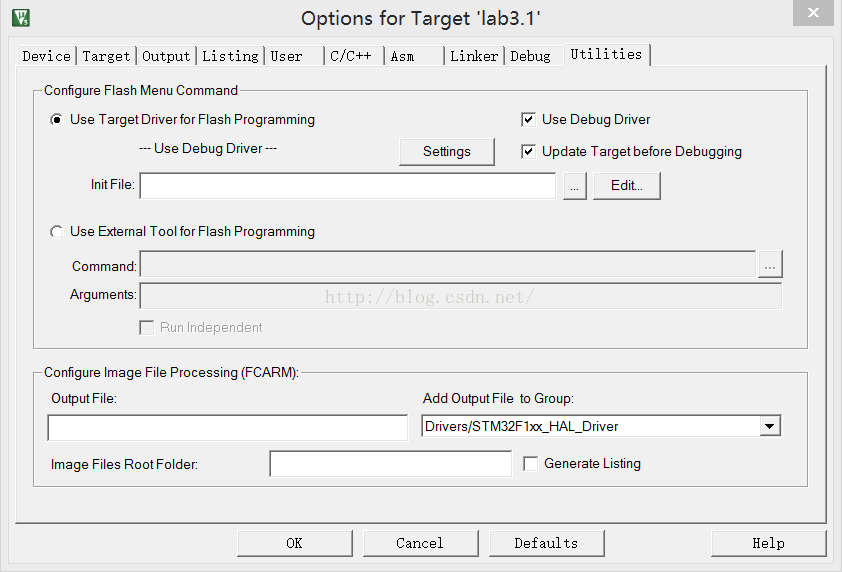
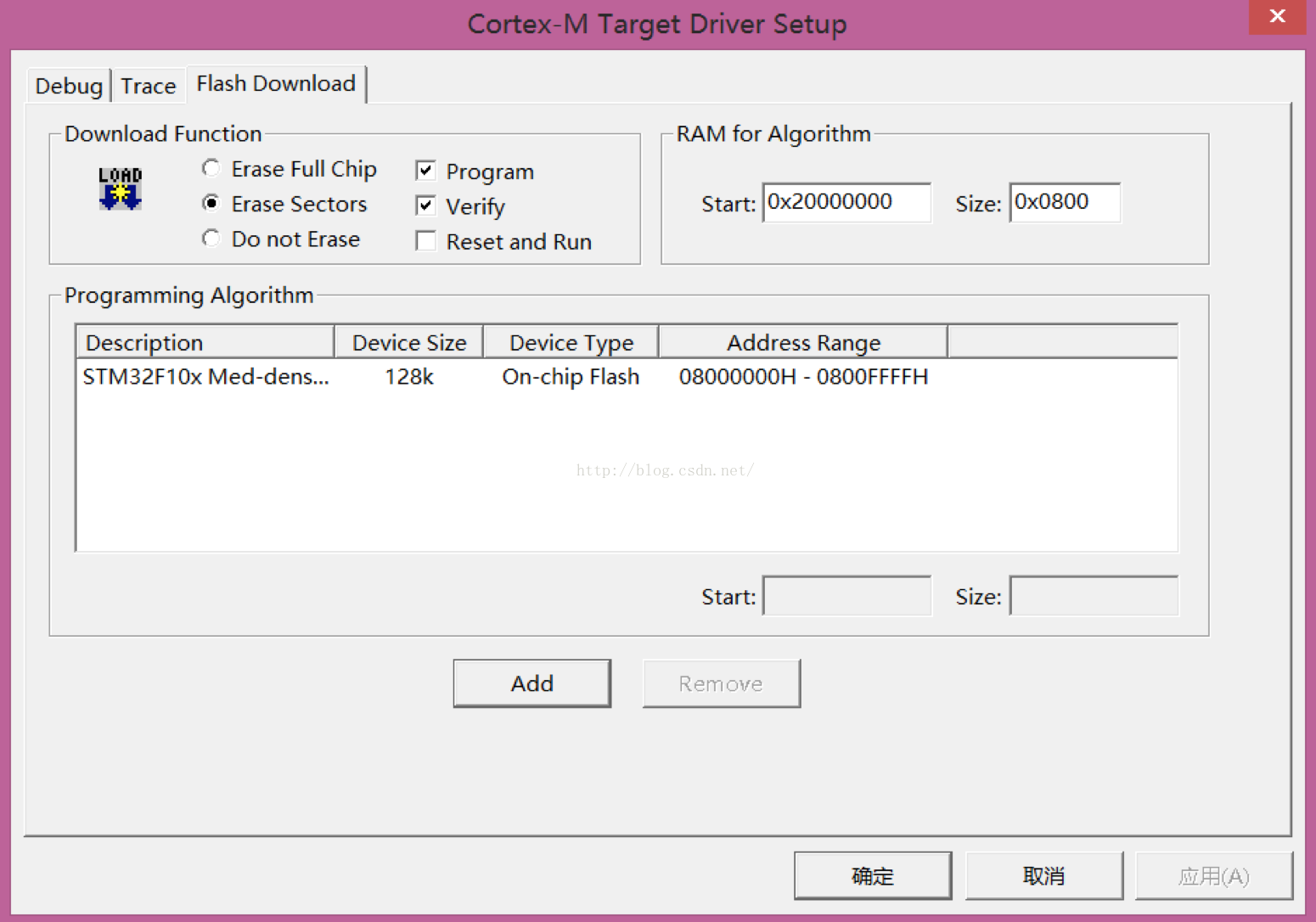
完成代码后,-准备编译。选择flash-设置,进入Utilities标签,选择settings,配置如下:
然后F7编译完成后将程序烧录至核心板,按一下板子上的reset开关就可以在putty看到串口输出了。

2. 通过面包板在PA11和PA12各连接一个按钮开关到地;
3. 编写Cube程序,配置PA11和PA12为内部上拉到输入模式,在main()函数循环检测PA11按钮按下,并在按钮按下时 在串口输出“Pressed”;
可以在CubeMX中图形化地更改引脚设置,也可以直接在代码中修改:
voidMX_GPIO_Init(void)
{
……
GPIO_InitStruct.Mode=GPIO_MODE_INPUT;
GPIO_InitStruct.Pull=GPIO_PULLUP;
……
}
在while(1)中添加代码,循环检测并输出
……
if(!HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_11))
HAL_UART_Transmit(&UartHandle,(uint8_t*)”Pressedrn”,9,500);
else
HAL_UART_Transmit(&UartHandle,(uint8_t*)”Notpressedrn”,13,500);
……
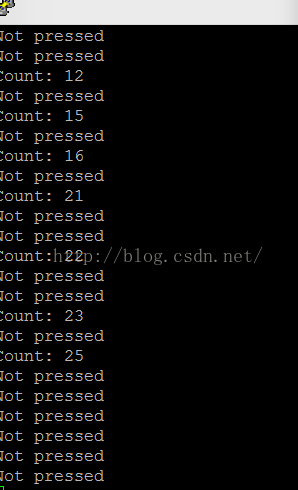
输出如图

4. 编写Cube程序,配置PA12下降沿触发中断,程序中设置两个全局变量,一个为计数器,一个为标识。当中断触发 时,计数器加1,并设置标识。
在主循环中判断标识,如果标识置位则清除标识并通过串口输出计数值;
在GPIO的init函数中为PIN12设置下降沿中断,并设置优先级。
GPIO_InitStruct.Pin=GPIO_PIN_12;
GPIO_InitStruct.Mode=GPIO_MODE_INPUT;
GPIO_InitStruct.Pull=GPIO_PULLUP;
GPIO_InitStruct.Mode=GPIO_MODE_IT_FALLING;
HAL_NVIC_SetPriority(EXTI15_10_IRQn,0,0);
HAL_NVIC_EnableIRQ(EXTI15_10_IRQn);
HAL_GPIO_Init(GPIOA,&GPIO_InitStruct);
PA12引脚的下降沿触发将会触发中断,进入函数EXTI15_10_IRQHandler,此时在函数中调用HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_12)表示查看PA12的值,如果符合条件,则触发HAL_GPIO_EXTI_Callback函数。代码如下
voidHAL_GPIO_EXTI_Callback(uint16_tGPIO_Pin){
if(GPIO_Pin==GPIO_PIN_12){
PA12flag=1;
PA12cnt++;
}else{
UNUSED(GPIO_Pin);
}
}
在main函数的while循环中添加代码:
if(PA12flag==1){
PA12flag=0;
size=sprint(str,”Count:%drn”,PA12cnt);
HAL_UART_Transmit(&UartHandle,(uint8_t*)str,size,500);
}
5. 编写Cube程序,开启定时器为200ms中断一次,中断触发时设置标识,主循环根据这个标识来做串口输出(取消4 的串口输出);
使用TIM3定时器,如果不是CUBEMX生成代码的话记得添加头文件引用。
添加init函数:
voidTIM_Init(){
TIM_Handle.Instance=TIM3;
TIM_Handle.Init.Prescaler=8000;
TIM_Handle.Init.CounterMode=TIM_COUNTERMODE_UP;
TIM_Handle.Init.Period=199;
TIM_Handle.Init.ClockDivision=TIM_CLOCKDIVISION_DIV1;
HAL_TIM_Base_Init(&TIM_Handle);
sClockSourceConfig.ClockSource=TIM_CLOCKSOURCE_INTERNAL;//设置时钟源为内部时钟
HAL_TIM_ConfigClockSource(&TIM_Handle,&sClockSourceConfig);
sMasterConfig.MasterOutputTrigger=TIM_TRGO_RESET;//设置复位模式,发生触发输入事件时计数器和预分频器能重新初始化
sMasterConfig.MasterSlaveMode=TIM_MASTERSLAVEMODE_DISABLE;
HAL_TIMEx_MasterConfigSynchronization(&TIM_Handle,&sMasterConfig);
HAL_NVIC_SetPriority(TIM3_IRQn,0,0);//设置优先级
HAL_NVIC_EnableIRQ(TIM3_IRQn);enable中断向量表处理
}
和之前设置的中断一样需要覆写中断触发函数TIM3_IRQHandler,而后在其中对时钟进行判断后触发HAL_TIM_PeriodElapsedCallback。并在callback中实现操作。
TIM_HandleTypeDefTIM_Handle;
TIM_ClockConfigTypeDefsClockSourceConfig;
TIM_MasterConfigTypeDefsMasterConfig;
intTIMflag=0,PA12flag=0;
intTIMcnt=0,PA12cnt=0,totalcnt=0;
voidTIM3_IRQHandler(void){
HAL_TIM_IRQHandler(&TIM_Handle);
}
voidHAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef*htim){
TIMflag=1;
TIMcnt++;
}
6. 编写完整的码表程序,PA12的按钮表示车轮转了一圈,通过计数器可以得到里程,通过定时器中断得到的时间可以计算出速度;PA11的按钮切换模式,模式一在串口输出里程,模式二在串口输出速度。
在main函数中实现码表程序:
while(1)
{
/*USERCODEENDWHILE*/
/*USERCODEBEGIN3*/
if(TIMflag==1){
TIMflag=0;
if(TIMcnt==5){每五个周期输出一次
speed=2*PA12cnt/1;//五个周期为1秒,车轮周长2米
查看评论 回复