STM32F1的UART4串口配置 -
[导读]注意是UART4,不是USART4在stm32中UART和USART是不相同的 USART是通用同步/异步串行接收/发送器 UART是通用异步收发传输器 简单区分同步和异步就是看通信时需不需要对外提供时钟输出,我们平时用的串口通信基本都是
注意是UART4,不是USART4
本文引用地址: http://www.21ic.com/app/mcu/201808/781340.htm
在STM32中UART和USART是不相同的
USART是通用同步/异步串行接收/发送器
UART是通用异步收发传输器
简单区分同步和异步就是看通信时需不需要对外提供时钟输出,我们平时用的串口通信基本都是 UART。
USART支持同步模式,因此USART 需要同步时钟信号USART_CK(如STM32 单片机),通常情况同步信号很少使用,因此一般的单片机UART和USART使用方式是一样的,都使用异步模式。
UART需要固定的波特率,就是说两位数据的间隔要相等。 UART总线是异步串口,一般由波特率产生器(产生的波特率等于传输波特率的16倍)、UART接收器、UART发送器组成,硬件上有两根线,一根用于发送,一根用于接收。 显然,如果用通用IO口模拟UART总线,则需一个输入口,一个输出口。
UART是一个并行输入成为串行输出的芯片,通常集成在主板上,多数是16550AFN芯片。因为计算机内部采用并行数据,不能直接把数据发到Modem,必须经过UART整理才能进行异步传输,其过程为:CPU先把准备写入串行设备的数据放到UART的寄存器(临时内存块)中,再通过FIFO(First Input First Output,先入先出队列)传送到串行设备,若是没有FIFO,信息将变得杂乱无章,不可能传送到Modem。
作为接口的一部分,UART还提供以下功能:将由计算机内部传送过来的并行数据转换为输出的串行数据流。将计算机外部来的串行数据转换为字节,供计算机内部使用并行数据的器件使用。在输出的串行数据流中加入奇偶校验位,并对从外部接收的数据流进行奇偶校验。在输出数据流中加入启停标记,并从接收数据流中删除启停标记。处理由键盘或鼠标发出的中断信号(键盘和鼠标也是串行设备)。可以处理计算机与外部串行设备的同步管理问题。
USART收发模块一般分为三大部分:时钟发生器、数据发送器和接收器。控制寄存器为所有的模块共享。时钟发生器由同步逻辑电路(在同步从模式下由外部时钟输入驱动)和波特率发生器组成。发送时钟引脚XCK仅用于同步发送模式下,发送器部分由一个单独的写入缓冲器(发送UDR)、一个串行移位寄存器、校验位发生器和用于处理不同浈结构的控制逻辑电路构成。使用写入缓冲器,实现了连续发送多浈数据无延时的通信。接收器是USART模块最复杂的部分,最主要的是时钟和数据接收单元。数据接收单元用作异步数据的接收。除了接收单元,接收器还包括校验位校验器、控制逻辑、移位寄存器和两级接收缓冲器(接收UDR)。接收器支持与发送器相同的帧结构,同时支持桢错误、数据溢出和校验错误的检测。USART是一个全双工通用同步/异步串行收发模块,该接口是一个高度灵活的串行通信设备。
综上可以看出,USART相对UART来说是在异步通信的基础上还有同步的功能,USART能够提供主动时钟。
UAST4的配置
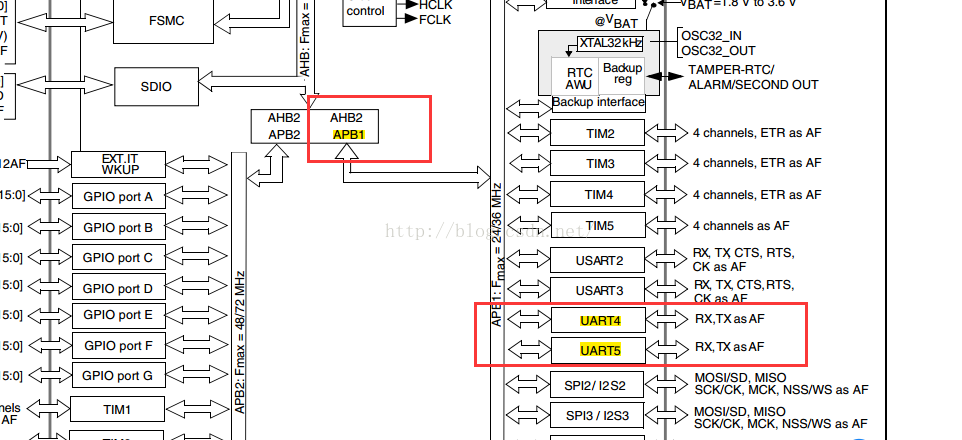
注意:在使用UART4之前,首先要确保你的单片机是支持UART4的(我用到的单片机是STM32F103vet6),具体是否支持UART4,可以参考数据手册。同时要注意,UART4是挂载到APB1总线上的!
初始化程序:
为了方便调试输出,我将USART1也进行了初始化,对比一下不难发现UASRT1的初始化和UART4的初始化几乎相同
GPIO_InitTypeDefGPIO_InitStructure;
USART_InitTypeDefUSART_InitStructure;
/*configUSART1clock*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_UART4,ENABLE);//注意UART4是挂载在APB1总线上的,用RCC_APB1PeriphClockCmd()函数初始化!
/*USART1GPIOconfig*/
/*ConfigureUSART1Tx(PA.09)asalternatefunctionpush-pull*/
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
/*ConfigureUSART1Rx(PA.10)asinputfloating*/
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;
GPIO_Init(GPIOA,&GPIO_InitStructure);
/*USART1modeconfig*/
USART_InitStructure.USART_BaudRate=115200;
USART_InitStructure.USART_WordLength=USART_WordLength_8b;
USART_InitStructure.USART_StopBits=USART_StopBits_1;
USART_InitStructure.USART_Parity=USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode=USART_Mode_Rx|USART_Mode_Tx;
USART_Init(USART1,&USART_InitStructure);
USART_Cmd(USART1,ENABLE);
//3?ê??ˉUART4-TX-PC10
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOC,&GPIO_InitStructure);
//UART-RX-PC11
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;
USART_InitStructure.USART_BaudRate=9600;
USART_InitStructure.USART_WordLength=USART_WordLength_8b;
USART_InitStructure.USART_StopBits=USART_StopBits_1;
USART_InitStructure.USART_Parity=USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode=USART_Mode_Rx|USART_Mode_Tx;
USART_Init(UART4,&USART_InitStructure);
USART_Cmd(UART4,ENABLE);
USART_ClearFlag(UART4,USART_FLAG_TC);
查看评论 回复